
En este nuevo capítulo programamos a Capi para poder transportar un objeto en Marte de una posición A a B.
En el capítulo anterior observábamos a Capi sorteando obstáculos gracias al sensor infrarrojo, ahora vamos un paso más allá.
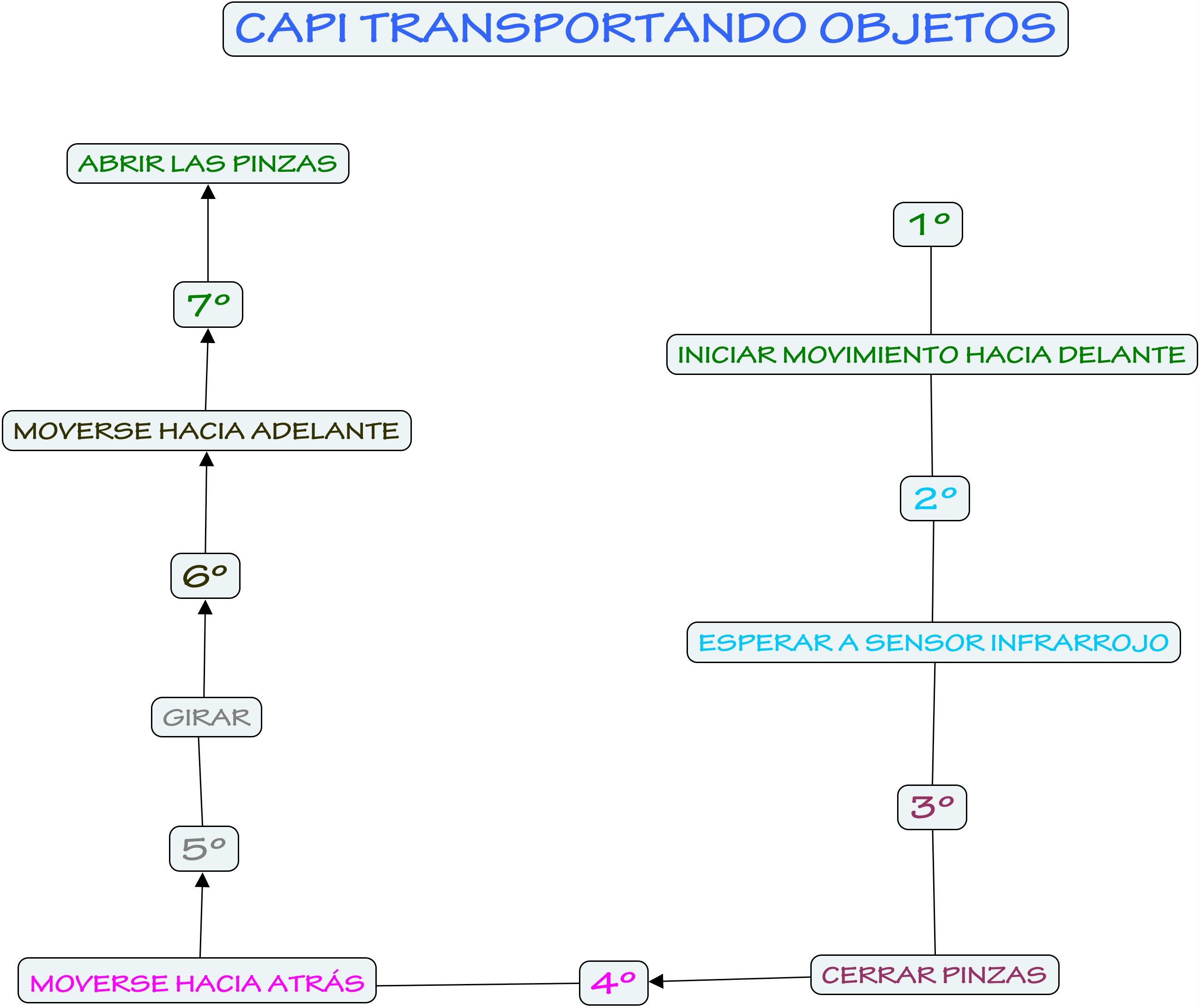
En el diagrama de flujo os mostramos cómo hemos numerado los pasos a seguir (haced click para aumentar la imagen).
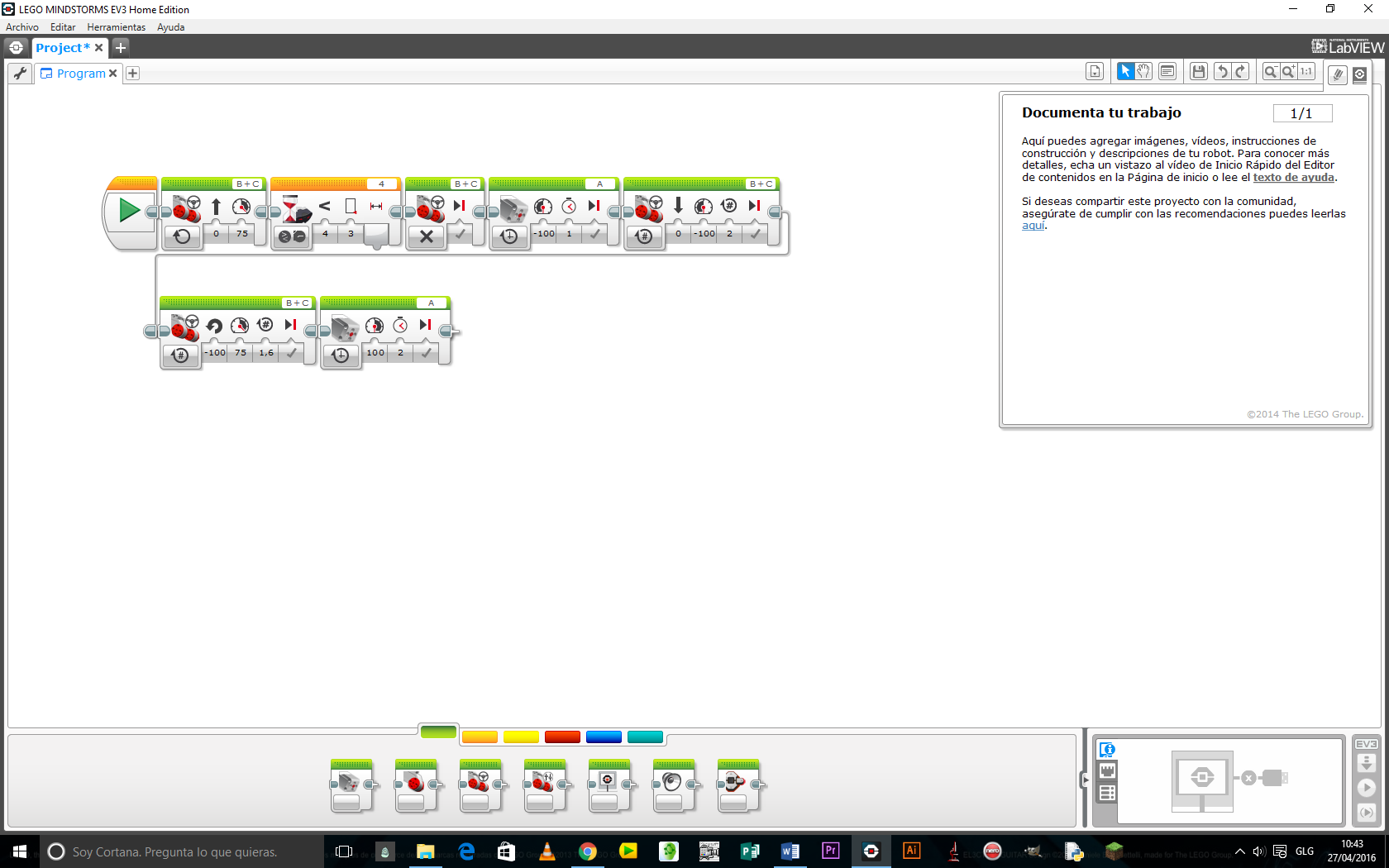
Aquí aparece una pantalla de la programación con el programa de Lego (de nuevo haced click para aumentar la imagen)
Aquí tenéis el vídeo del resultado final.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}